This demo, an ancillary product developed for the Parkinson project, showcases the capability of hand motion capture using a camera on the device. It employs MediaPipe to estimate the coordinates of hand joints in three-dimensional space, which are then transmitted to a Unity port. Unlike the Parkinson project, in this demo, I linked the hand model skeleton with the corresponding node coordinates received from MediaPipe, and meanwhile, specified the parent-child node relationships through code. Finally, the rotation information (Quaternion) of adjacent nodes is updated every frame to achieve an effect that closely approximates real-time motion capture.
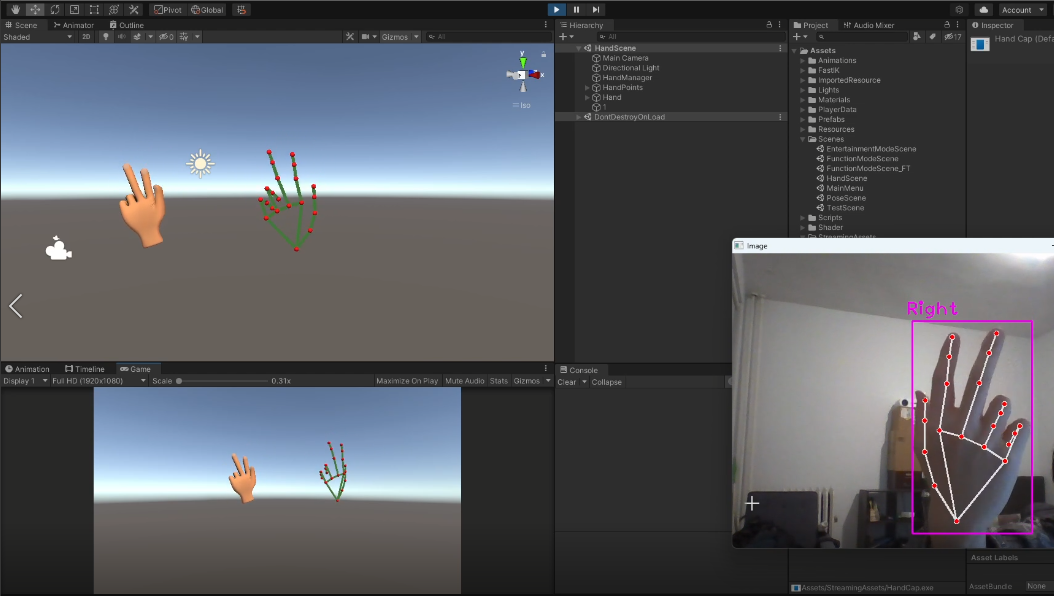
RUNNING TEST Video